Figures

Figure 1.. Example of a measurement: Pedogram with gait lines of a female patient with pes equinus on the right side.
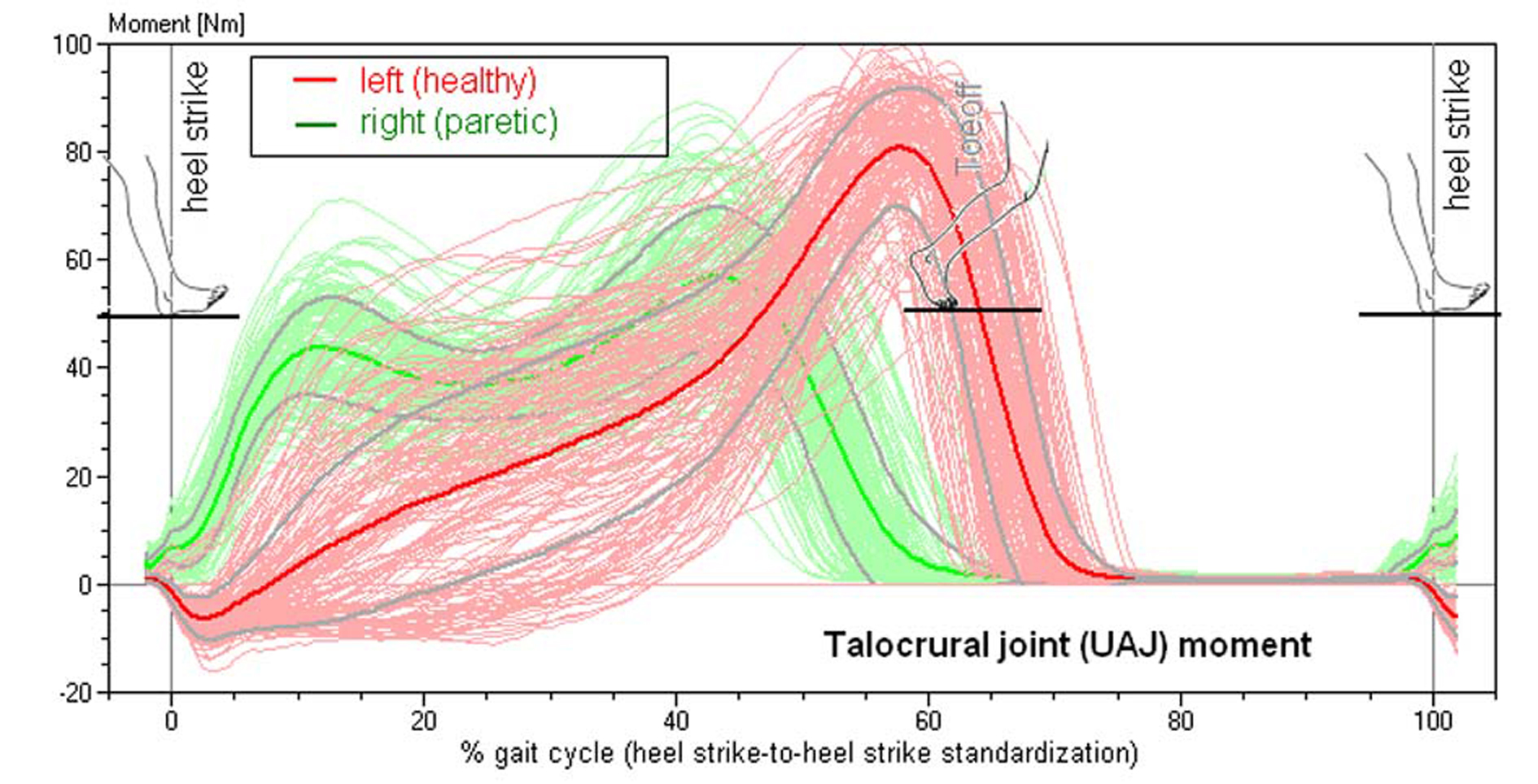
Figure 2.. Torque of the talocrural joint in a patient with spastic hemiparesis on the right side (compare to Figure 4). Superimposed 156 individual steps, median curve and standard deviation.
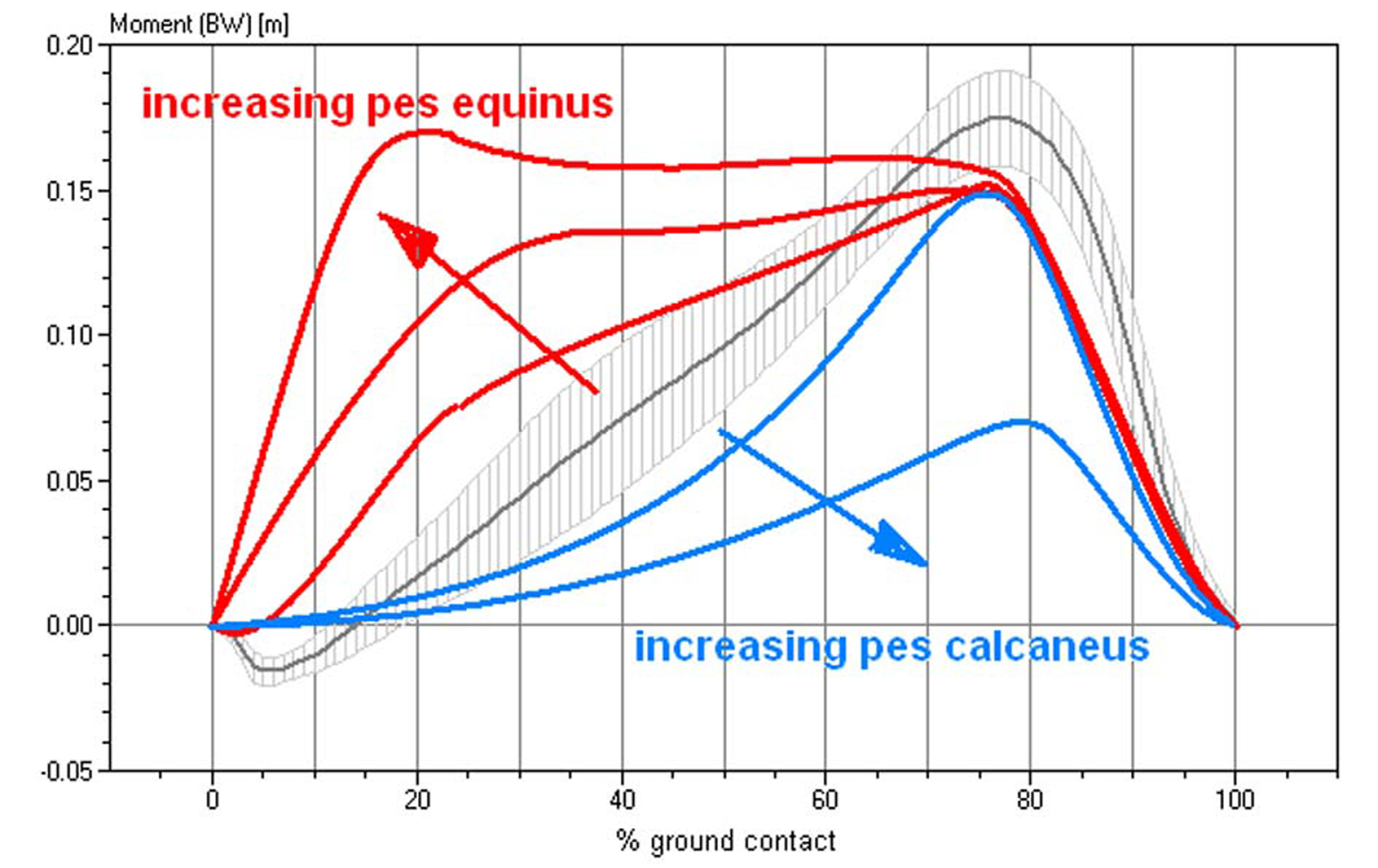
Figure 3.. Characteristics of the torque curves of the talocrural joint in different functional pes equinus type, ranging from a completely rigid pes equinus to a flail paralytic pes equinus. This diagram standardizes the torque for the respective body weight. Gray and hatched in the background, the averaged talocrural joint torque in 103 healthy study volunteers.
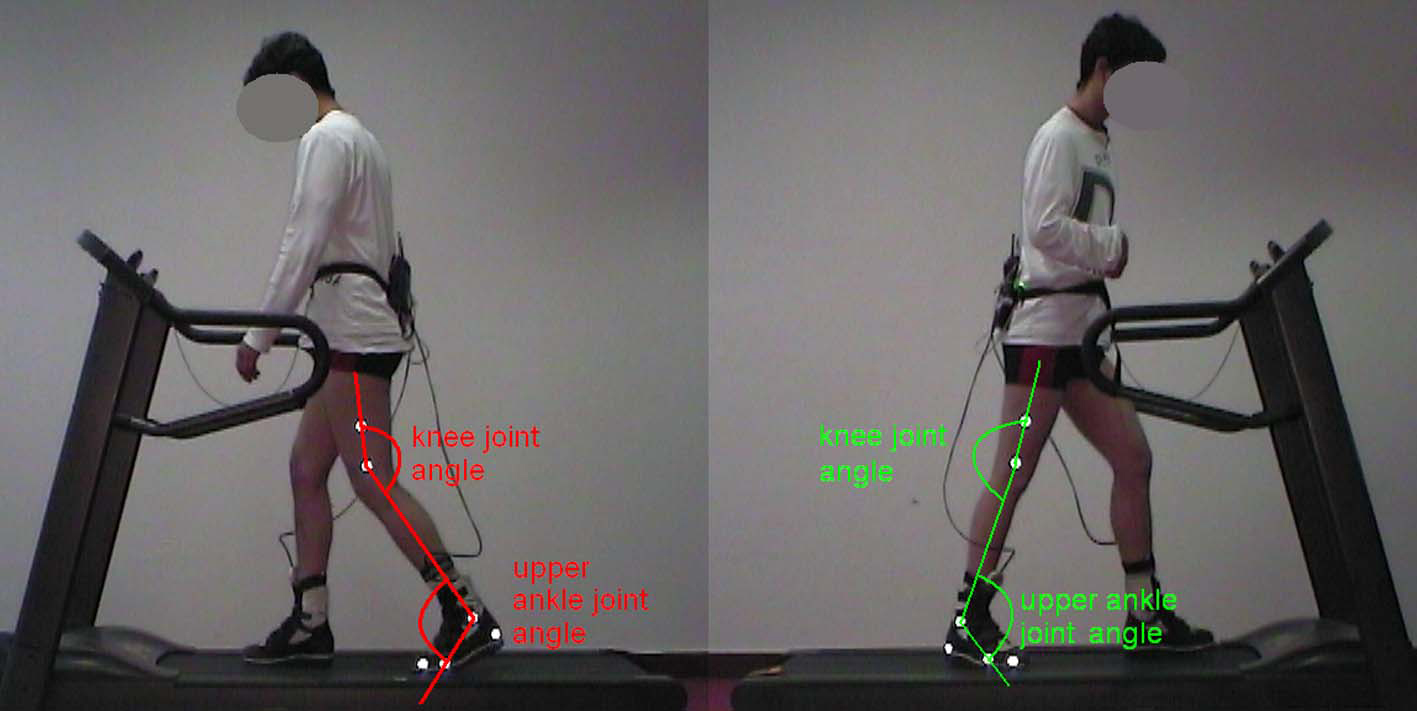
Figure 4.. 2D movement analysis with reflective markers and joint angle measurement in a patient with spastic hemiparesis on the right side.
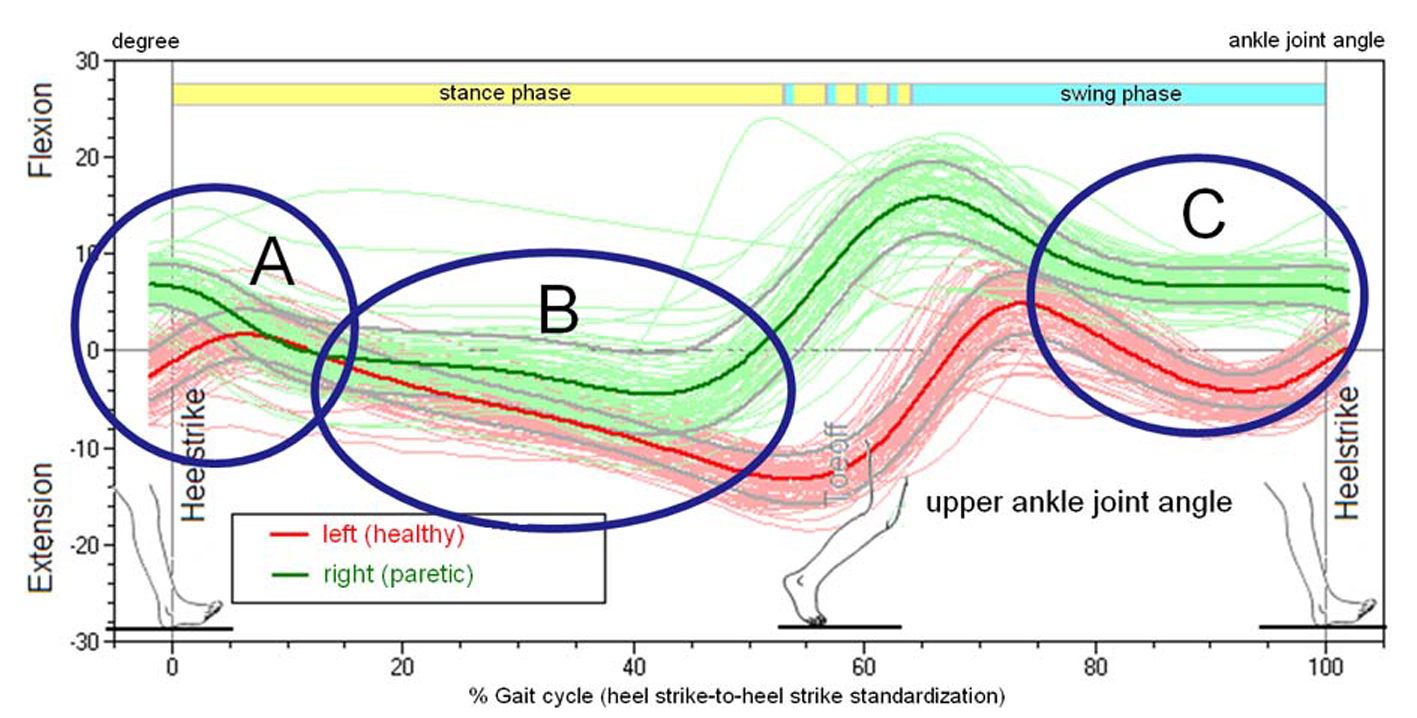
Figure 5.. Joint Angle of the talocrural joint (upper ankle joint, UAJ) during the gait cycles, orthopedic notation, patient from Figure 4.
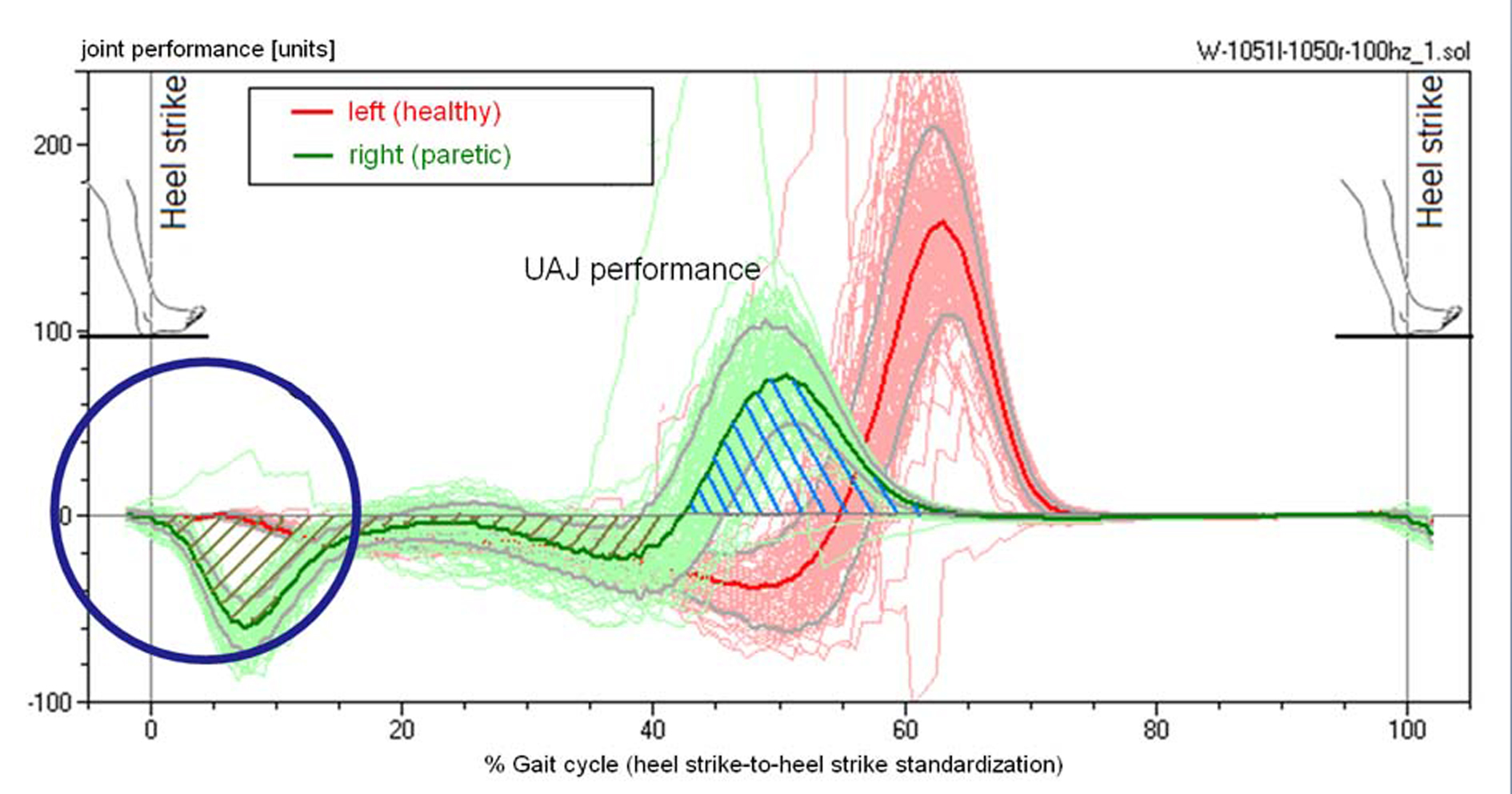
Figure 6.. Performance of the calf muscle, patient from Figure 4. The energy that is absorbed during the extension is released again at the end of the contact phase.
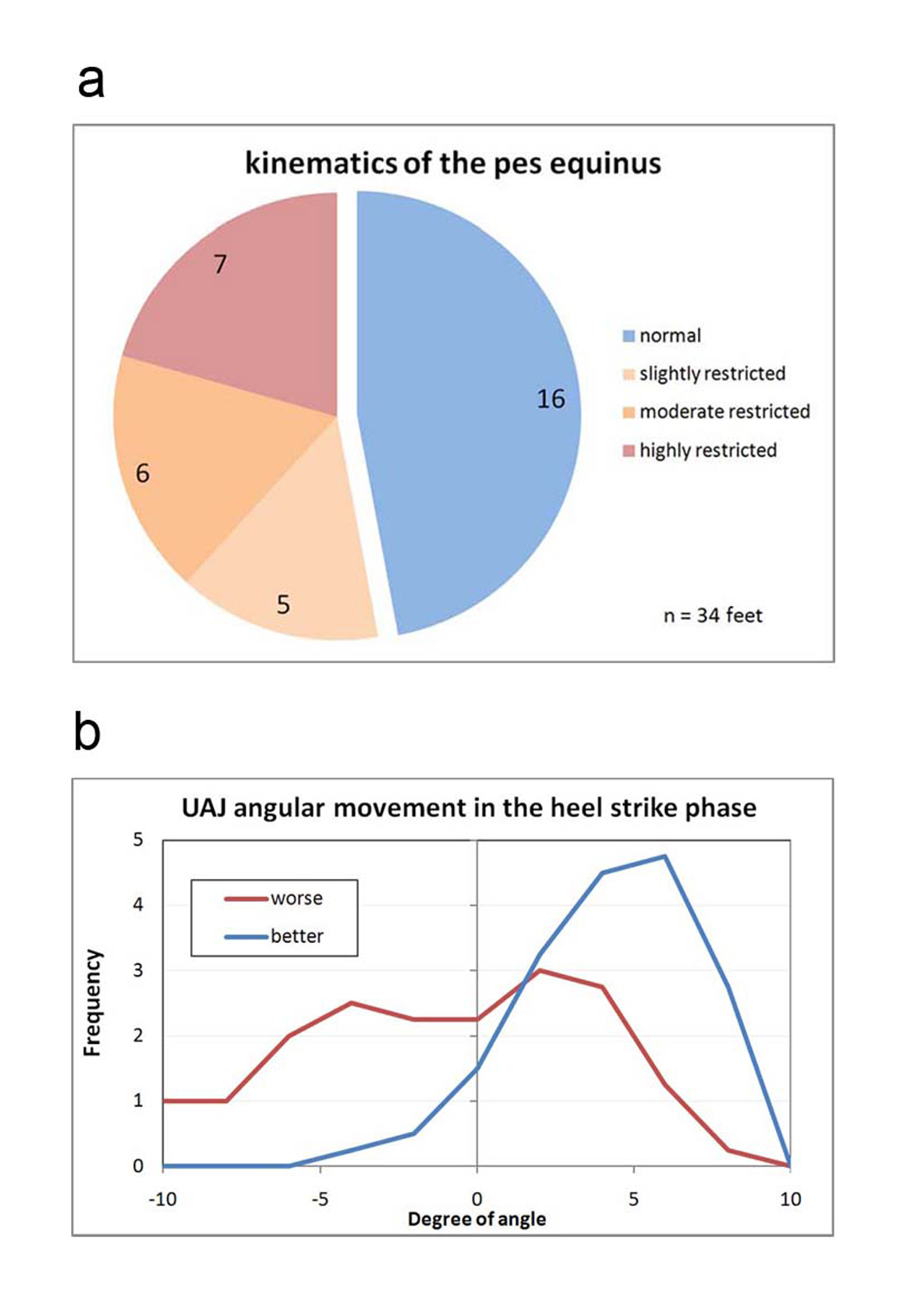
Figure 7.. (a) Classification of the angular movement of the talocrural joint in the folding phase during heel strike. Normal: Angle progression during heel strike with lifting and folding as in a healthy person, meaning primarily, in a stride, the foot is placed with the heel first while the forefoot is being actively lifted. Slightly restricted: The forefoot is only minimally lifted during the heel strike event. Moderately restricted: The foot is placed more or less flat. Highly restricted: The foot hangs in plantar flexion during the heel strike event and the first contact with the ground occurs with the forefoot or the toes. (b) Frequency distribution of the measured folding angle in the talocrural joint during the heel strike phase.
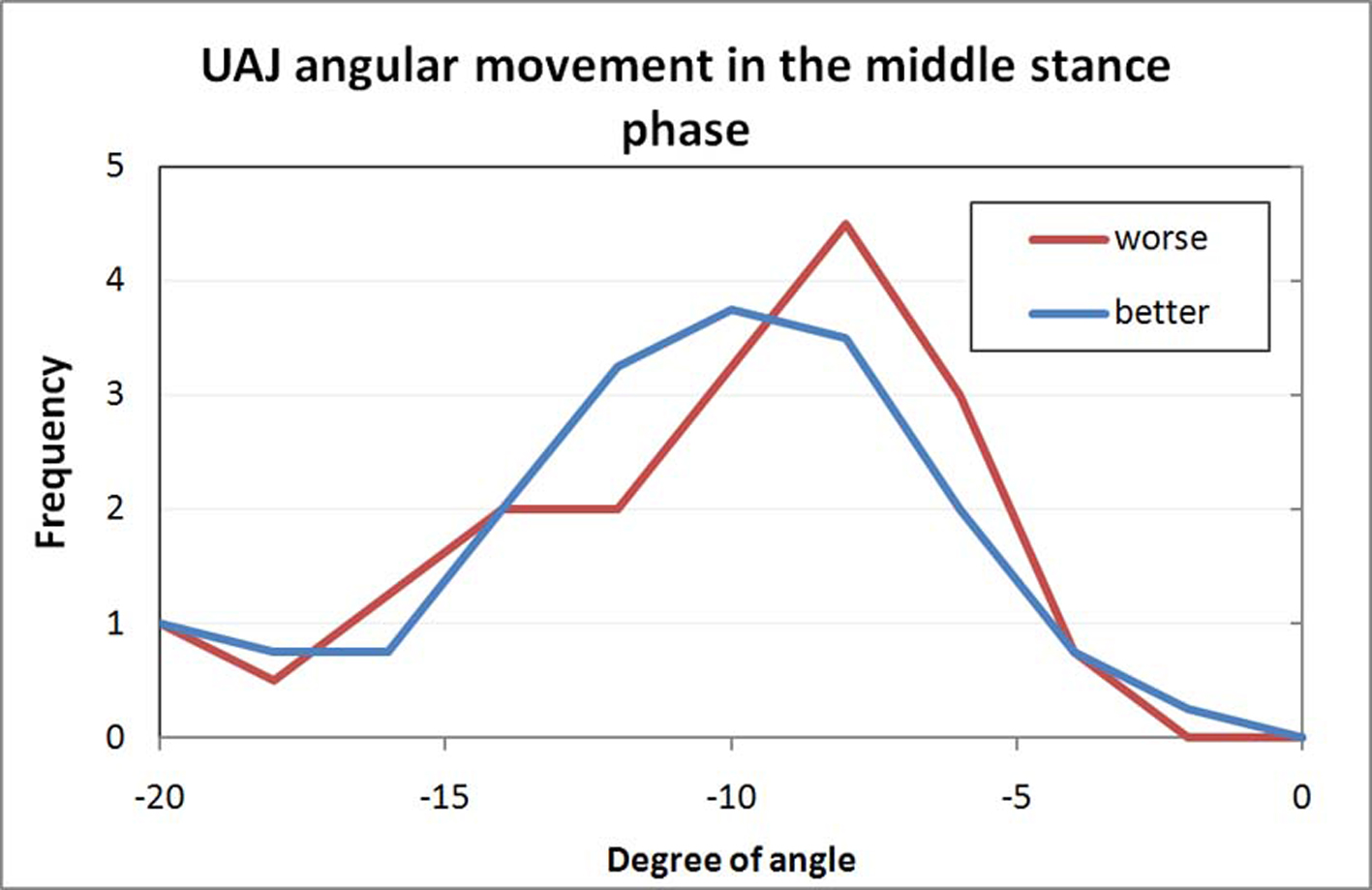
Figure 8.. Frequency distribution of the measured folding angle in the talocrural joint during the middle stance phase.
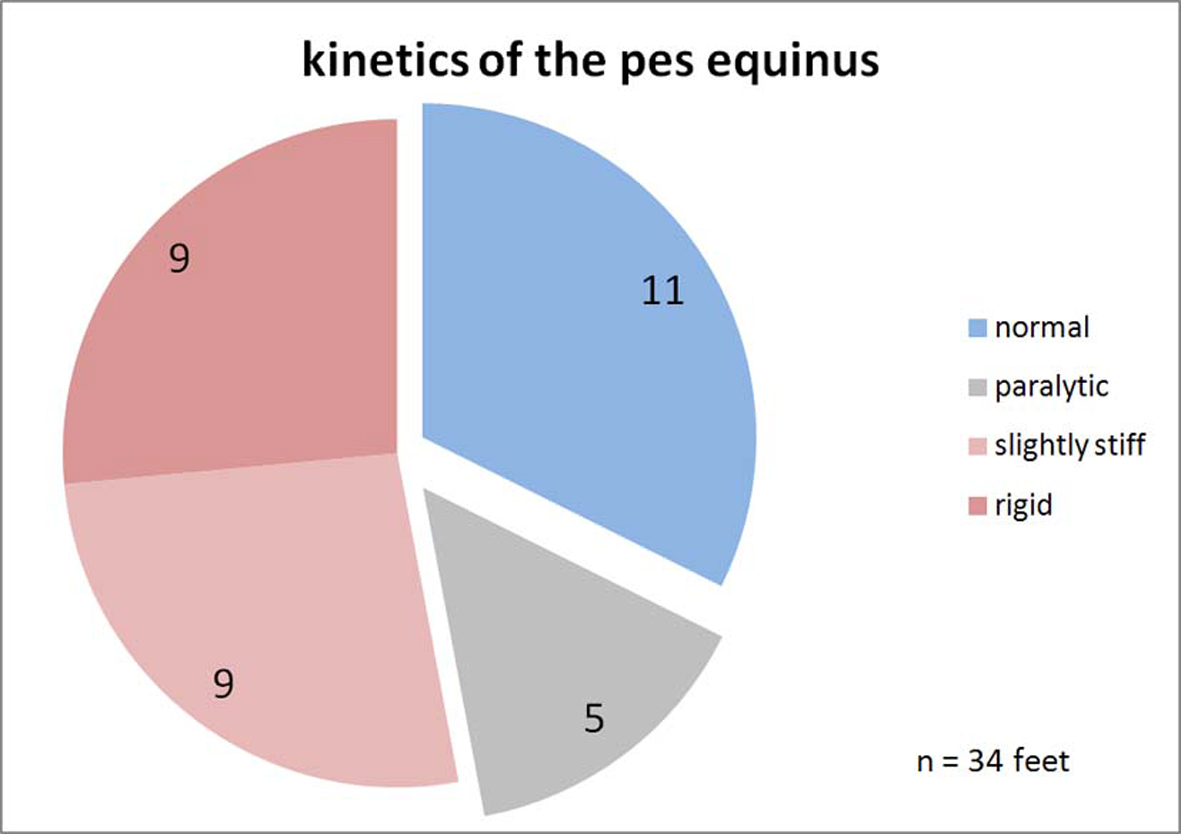
Figure 9.. Classification of the upper ankle joints kinetics. Normal: The progression of the torque curve is as in healthy study volunteers. Paralytic: The torque increases with a temporal delay and stays less overall. Slightly stiff: Somewhat premature increase of the torque curve. Rigid: Quick increase of the torque, the curve is similar to the ground force curve because the point of application of force is permanently in the forefoot.
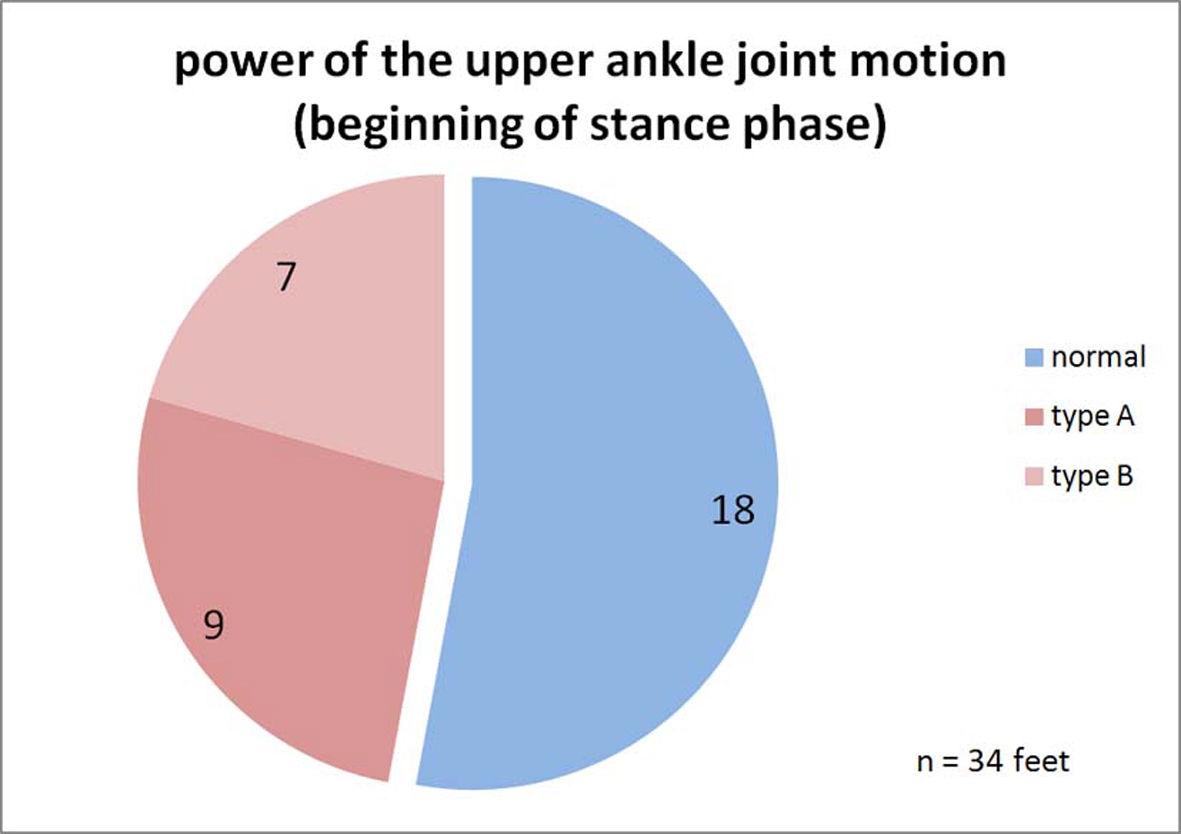
Figure 10.. Classification of the power of the upper ankle joint motion. Normal: The performance curve of the talocrural joint in the heel-strike phase is at 0; no movement energy is extracted. Plastic: During the heel-strike phase and beyond the middle of the stance phase, energy is continuously absorbed by the talocrural joint structure. Rigid: Energy is only absorbed during the heel-strike phase and the muscle-ligament structure is loaded like a spring. This energy may be released again during the toe-off phase and would then not be lost.
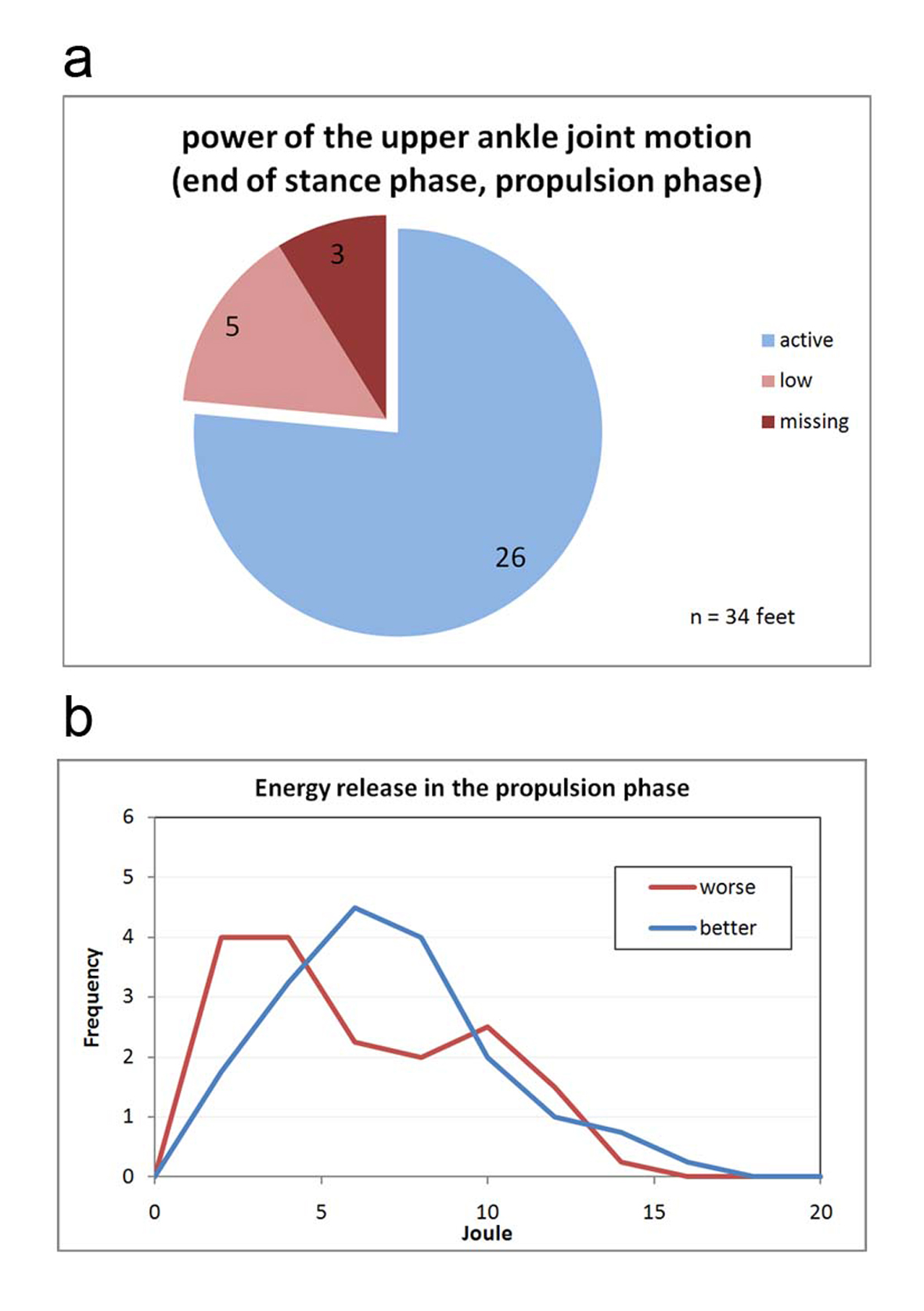
Figure 11.. (a) Classification of the power of the upper ankle joint motion. Active: The joint performs work during push-off propulsion. The work can be generated by the calf muscle via metabolic activity or may be recovered in the rigid pes equinus from the spring tension of the heel-strike event. Low: The energy generation can occur as with <Active>; but it is visibly below that of the healthy side (in hemiparesis) and/or that of a healthy study volunteer. Missing: The paretic leg does not generate push-off propulsion energy. In practice, this is only possible in cases of hemiparesis because locomotion is otherwise almost not possible. (b) Frequency distribution of the measured propulsion energies while walking.